Что касается выплат по Закону 1244-1 чернобыльцам.
Забывая подать заявления на выплату ежегодной компенсации, в частности за вред здоровью они ее не получают. Поэтому, чернобыльцы высказывали пожелания об упрощении порядка, чтобы такая и подобные компенсации выплачивались в беззаявительном порядке. Но Правительство усложнило этот процесс и теперь к началу следующего года количество чернобыльцев оставшихся без таких выплат может увеличиться. Считаю, что Государство обязано выплачивать положенные по Закону выплаты не спрашивая на то желания получателя такой выплаты, без заявлений от них.
Уважаемые крымчане чернобыльцы, пользователи сайта. Эта публикация к 8.15 час. 14 октября имеет 1060 просмотров, но только 15 человек проголосовавших в опросе. Неужели не интресен итог? Не верю что Вы столь инертны. Пожалуйста активней, включайтесь в процесс. Не отмалчивайтесь, Ваше мнение важно! И оно будет иметь немаловажное значение.Если Вы, уважаемые пользователи сайта не находите свой вариант ответа в опросе, предложите его в комментарии к публикации, как это сделал Самбурский Г.А.
Не секрет, что некоторые чернобыльцы, забывая подать заявления на выплату ежегодной компенсации, в частности за вред здоровью в итоге ее не получают. По этой причине чернобыльцы высказывали пожелания об упрощении процесса, чтобы такая и подобные компенсации выплачивались в беззаявительном порядке. Однако внесенные Правительством изменения в порядок начисления таких выплат созданием излишней волокиты усложнили этот процесс и теперь возможно к концу года, к сожалению количество чернобыльцев не получивших такие выплаты может увеличиться. Сведений о получателях таких выплат у плательщика предостаточно. Сколько можно перепроверять их?
Уважаемая администрация сайта, уважаемый Григорий Яковлевич, вы как- то там на редакторском совете сайта определитесь..... Вот вы предлагаете проголосовать и сказать наше мнение о товарище Ткачёвой М.Р. Никого не хочу обидеть, выражаю только своё личное мнение, но думаю, что я не одинок в своих мыслях. Я не знаю этого человека, не знаю, чем она конкретно занимается, автором каких инициатив является, что реально сделала в своем регионе и в Крыму и т.д и т.п. Перечень вышеперечисленных ссылок по печатным и видео-материалам абсолютно не проясняет картину об информационном массиве деятельности уважаемой Ткачёвой Марины Рувиновны как в общественно-социальной так и чернобыльской направленности. Более чем за полторы суток нахождения статьи на сайте, сегодня на 19.40 проголосовало всего 13 человек из просмотревших эту статью 270 человек. Это только 4,8 % !!! Так вот стоит ли ставить на сайте вопрос о голосовании за человека, о деятельности которого, никто не знает ???
«Роботы, использовавшиеся на крышах ЧАЭС, были очень «сырыми», недоработанными. Все они вместе и каждый в отдельности – техническая никчемность, придуманная впопыхах на «паркете». Говорю об этом ответственно, так как лично эксплуатировал их. Германские MF-2 и MF-3 сразу вышли из строя, самоходный трехколесный дозиметр и «роботенок»…. Дорабатывать имело смысл только робот разработки МВТУ им. Баумана на гусеничном ходу, но он «погиб» сорвавшись с вертолетного фала на кабину бетоновоза. Слава богу, находившийся в кабине водитель остался невредим.
Основными недостатками робототехники была пробуксовка из-за малого веса и слишком чувствительная к радиационному облучению электроника. Аккумуляторы гибли уже на 3-и сутки. Импортные роботы «слепли», несмотря на высококачественную оптику фирмы «Цейс». Она темнела быстрее, чем отечественная, которая была изготовлена из простого бутылочного стекла. Кроме того, люди, управляющие роботами дистанционно, как правило, получали в несколько раз большую дозу облучения, чем люди, работавшие на бульдозерах, кабины которых были защищены свинцовыми листами. За период с 4 сентября по 1 ноября 1986-го, мне лично приходилось несколько раз в день выбегать на кровлю и вырывать из радиоактивных завалов кабель управления и «драные» ТВЭЛы из гусениц робота.
Я убежден, что ничего плохого с людьми не случилось бы, если к ликвидации последствий аварии на ЧАЭС подошли через несколько лет, с выверенными решениями и технологиями. Вместо этого советская власть «побуждала» людей к героизму».
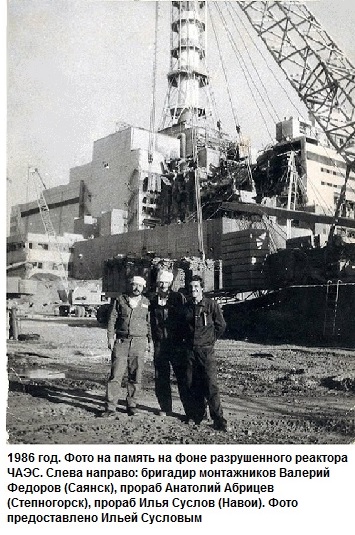
Это фрагмент воспоминаний члена штаба члена штаба ликвидации аварии на ЧАЭС, кандидата технических наук Петра Васильевича Швыдько, который был одним из тех, кто непосредственно эксплуатировал роботов на ЧАЭС. Совсем недавно дочь Петра Васильевича передала в фонды музея весь его многочисленный чернобыльский архив, среди материалов которого и фотографии чернобыльских роботов.
Попробуем разобраться насколько был прав в своих оценках использования робототехники Петр Васильевич Швыдько, чем она могла помочь человеку справиться с последствиями ядерной катастрофы.
В условиях высоких полей радиации на ликвидации последствий ядерной аварии на Чернобыльской АЭС использовались различные типы и виды робототехники, требования к которой отличались в зависимости от характера выполняемых работ. Это были роботы-разведчики, наблюдатели, погрузчики, дезактиваторщики, транспортные роботы из числа новейших отечественных, а также закупленных в срочном порядке импортных – из ФРГ, Японии, Финляндии.
Решение применить роботизированную телеуправляемую технику было принято немедленно, в первые дни после аварии. Роботы появились на станции уже 3 мая 1986 года. Первый робот-разведчик представлял собой детскую игрушку. Это был игрушечный танк, купленный в магазине «Детский мир», к нему прикрепили дозиметр и фонарик. Управлялся он по длинному кабелю от пульта управления. Несмотря на примитивную конструкцию, робот проработал несколько месяцев. За время работы он настолько загрязнился, что был захоронен где-то в недрах блока.
Первопроходцами стали «гражданские» машины с дистанционным управлением, советские ДЭТ- 250 (дизель-электрический трактор) весом более 32 тонн, японские KOMATSY-D-155W и финские шахтные погрузчики TORO. Основным, и, пожалуй, самым существенным недостатком всех без исключения роботов, являлась чувствительность к радиации. Работая в высоких радиационных полях в сотни, а в некоторых местах тысячи рентген, электроника сразу выходила из строя.
Самым известным роботом стал легендарный СТР-1 (специализированный транспортный робот), известный как «луноход». Он действительно был создан на колесной базе самоходных шасси луноходов, которые были использованы по программе «Луноход-1», в 1970 году, и «Луноход-2» в 1973 году. Робототехнический комплекс СТР-1 был создан за 3,5 месяца усилиями десятков организаций и предприятий. Основными участниками кооперации были три предприятия: ВНИИ АЭС, Москва - данные по архитектуре зданий третьего блока, условия эксплуатации техники на его кровлях, разработка и изготовление рабочего органа – бульдозерного отвала с механизмом подъема и опускания; ИФТП, Москва – разработка и создание телерадиокомплекса; ВНИИТРАНСМАШ, Ленинград – общая идеология комплекса.
В конструкции СТР-1 можно выделить три составные части, которые работали автономно: самоходные шасси с блоками и устройствами, обеспечивающими движение, бортовой радиотелевизионный комплекс (РТК), рабочий орган. В результате комплекс представлял собой шестиколесное транспортное средство, с индивидуальными приводами колес и тормозами, многие детали были выполнены из титана. Автономность обеспечивалась применением двух цинково-серебряных батарей, для их изготовления был использован 31 килограмм серебра. Отсутствовали кабельные связи со стационарным оборудованием по управлению и энергопитанию. Робот уверенно разворачивался «на месте», с радиусом равным нулю. Электрические блоки были собраны на элементах не восприимчивых к радиации и размещены в специальном контейнере за свинцовой защитой. Обзорная и две курсовые телекамеры были оснащены радиационно-стойкими стеклами. Масса робота составляла 1100 килограмм, скорость движения 0,46 км/час. Было изготовлено несколько комплексов СТР-1 с манипулятором и ковшом впереди.
20 августа 1986 года, комплекс СТР-1 был развернут на кровле центрального зала (ЦЗ) и в защищенных пультовых помещениях 3-его энергоблока. Первоначально для развертывания был использован кран «Libcher». После аварии крана для доставки и эвакуации всей техники на кровлю и с кровли, использовались вертолеты МИ-8 с внешней подвеской. Для транспортировки на роботе была установлена специальная транспортировочная рама. Характер завалов на всех кровлях определялся разновидностью составляющих его материалов. После аварии, в результате взрыва и пожаров, вследствие высоких температур произошло расплавление рубероидно –битумных слоев кровли которые вобрали в себя обломки графитовой кладки, трубы тепловых каналов, металлические и бетонные фрагменты конструкций. В результате, движение роботов в завалах были очень сложным. Но роботы СТР ни разу не прекращали движения из-за потери проходимости.
Все экземпляры отчетов о работе роботов были засекречены, и, к сожалению не публиковались в полном виде. Более поздняя судьба отчетов неизвестна. По имеющимся сведениям от разработчиков, роботы работали на кровле ЦЗ ( зона К), на подтрубной площадке(зона М) где зашкаливали измерители мощности дозы со шкалой до 10 000 Р/час, на отметках 70,93 (зона Л) и на 50,02 (зоны Б и В). В зоне Б мощность экспозиционной дозы (МЭД) рентгеновского и Y-гамма излучения составляла от 2800 до 3100 Р/час.
По оценке штаба по ЛПА на ЧАЭС, использование робототехнического комплекса СТР-1 позволило исключить привлечение к работам в опасных зонах более 1000 человек. Только в зоне В, было удалено более 90 т радиоактивных материалов, что снизило радиационный фон на два порядка.
Бесславно погиб немецкий радиоуправляемый робот для разминирования с игривым названием «Joker». На гусеничном ходу, с большим манипулятором и камерами видеообзора. Его учили отключать и снимать взрывные устройства. Но ему не повезло: вначале он оказался на завале графитовых сборок с высокой радиоактивностью, пытался сдвинуться с места, забуксовал и остановился. Солдаты «партизаны» пробовали вытащить его из завала лебедкой, но она сломалась. Впоследствии его смогли зацепить краном сотрудники из отряда дозиметрической разведки и снять на землю. «Joker» больше не заработал. Его электронный мозг не выдержал радиационный фон в 10 000 рентген.
Робот MF-3 с рукой манипулятором, которая имела четыре степени свободы и поворот манипулятора на 360 градусов. Это был робот компактной транспортировки, на четырех гусеницах, с возможностью поднимать их для маневренности. Он сам поднимался по лестницам на нужную отметку, выходил на кровлю и мог что-нибудь взять и отнести в нужное место. Но при большом объеме работ был малоэффективен. К тому же управлялся он по кабелю, который волок за собой, а при наличии острых предметов на кровле, кабель часто повреждался.
Уважаемый посетитель, Вы зашли на сайт как незарегистрированный пользователь. Мы рекомендуем Вам зарегистрироваться либо войти на сайт под своим именем.
Информация
Комментировать статьи на сайте возможно только в течении 100 дней со дня публикации.


 Симферополь:
Симферополь:



")




































 Просмотров: 952 |
Просмотров: 952 |  Комментариев: (0)
Комментариев: (0)